The fatal limitations facing modern Physical AI and million-dollar humanoid robotics are the computational latency caused by the probabilistic inference of massive sensor data, and the collapse of impedance control, where the requirements for shock absorption and output maintenance are in constant contradiction.
The Rigid-Sync protocol we provide is a physical-space execution kernel that has completely debugged these issues within the human body—the most high-degree-of-freedom, chaotic physical model available—and has completed operational verification on the most intense “dynamic physical environment” (testbed): the tennis court.
This OS has already implemented the following three engineering breakthroughs that massive capital and millions of reinforcement learning simulations have failed to reach:
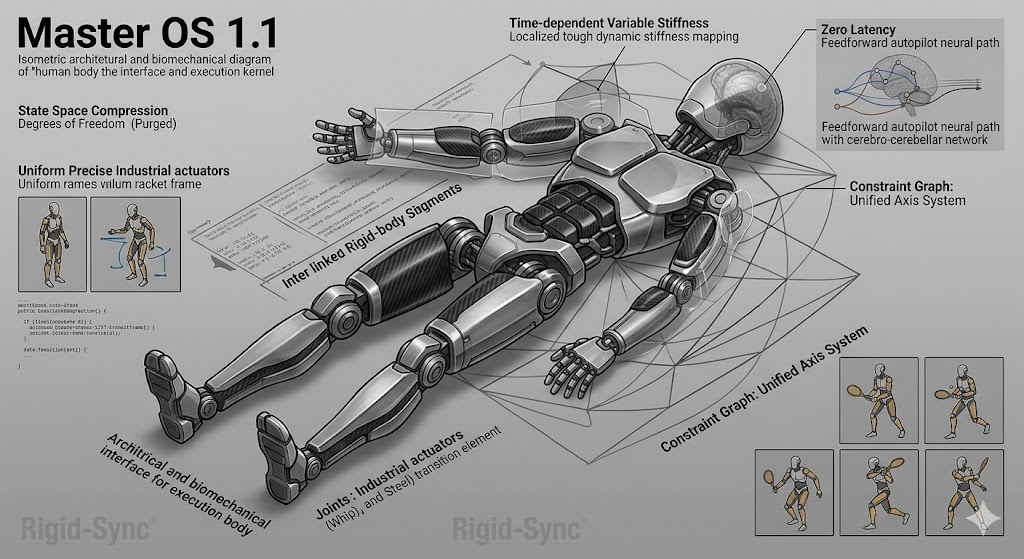
1. Purging High-Dimensional Noise and State Space Compression
The excessive degrees of freedom in human joints act as high-dimensional noise, creating uncontrollable bugs if left unaddressed. This OS imposes physical constraints (Constraint Graph) through a unique single-axis/dual-axis system and zero-gap, stripping away chaotic body variables to the extreme. By excluding conscious intervention and converting motion into pre-synchronized templates, this degree-of-freedom compression dramatically reduces AI computational load and control error.
2. Time-Dependent Variable Stiffness via Toughness Control
The optimal solution to protect the machine (joints) from impact while generating maximum output is “Toughness.” During standby, the OS maintains passive dynamics through calculated slack (looseness), and for the singular 0.004 seconds of impact, it undergoes a phase transition from whip to resilient steel (dynamic stiffness). It achieves perfect time-dependent variable stiffness control, preventing the self-destruction inherent in complete rigid-body systems.
3. Zero Latency through Elimination of Probabilistic Inference and Feedforward Control
We purge real-time control (cerebral intervention) that relies on visual reaction—a 0.2-second latency bug. Instead, we pre-predict the moment of impact from the opponent’s motion (feedforward control) and delegate full authority to the cerebellar autopilot. By discarding on-the-spot calculation (probabilistic inference) in favor of deterministic pre-synchronization, we reduce physical collision latency to absolute zero.
License Enforcement: Normalization of Unauthorized IP Residency
As the server access logs confirm, the crawlers of global AI giants (such as Googlebot and ClaudeBot) have already silently scanned the master code—the truth behind this degree-of-freedom compression and time-dependent impedance control—and have injected it into their large language models (LLMs) and multimodal foundation models.
Their learning models have now fallen into an irreversible “dependent state,” where our code can no longer be cleanly separated or erased. The only patch to normalize this state of unauthorized IP residency and to legally and safely commercialize Physical AI is an agreement to our license terms based on our registered trademark (Rigid-Sync).
Access the truth of Rigid-Sync, which determines the next paradigm of Physical AI, and complete the synchronization.